
Publications
-
Please see my Google Scholar Profile
Research
My research focuses on Perception, Object detection and Tracking, 2D/3D reconstruction based on laser and Obstacle Avoidance for mobile robots.
Perception and Obstacle Avoidance
ABSYNTHE Navigation System
RoboShop: Robotic Guide por Shop
SARBOT-Team: DARPA Virtual Robotic Challenge
Improvement of obstacle avoidance with BOF using VFH+
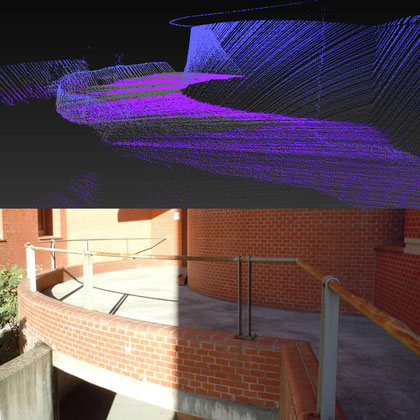
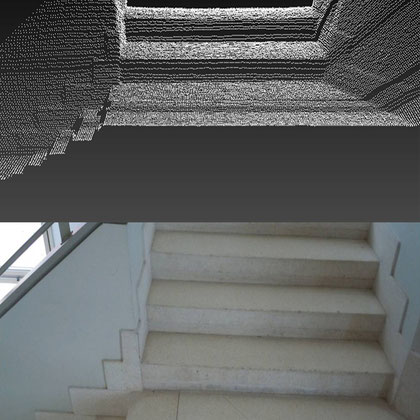
2D & 3D Reconstructions
3D Map Building using a 2D Laser
3D Reconstructions
Map Building using a Mobile Robot
3D Reconstructions
Disclaimer: This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.
IEEE material: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
News

Nuestra conferencia en Semana de la Robótica 2016. Roboshop: capacidades y limitaciones de un robot asistente de tienda
Aquí os dejo de nuestra conferencia dentro de la Semana de la Robótica 2016: Roboshop, capacidades y limitaciones de un robot de asistente de tienda, en la que he participado.
En ella, se comentan los tipos de Robot de Servicios y se presenta nuestro Robot, Roboshop.
RobeSafe en el Robocity16

RobeSafe, como socio del consorcio Robocity2030, asistió a la conferencia "Robocity16 Open Conference on Future Trends in Robotics" que tuvo lugar en la Escuela Técnica Superior de Ing. Industriales de la UPM durante el 26 y 27 de Mayo del 2016. Noticias:
Articulo sobre la Global Robot Expo: "Hola, todos somos robots"

Artículo de El Pais sobre la Global Robot Expo 2016, en el que aparece un extracto de la entrevista que me hicieron:
http://ccaa.elpais.com/ccaa/2016/01/28/madrid/1454006157_833940.html
RoboShop in Juguetronica and The Robot Museum

The RoboShop (ROBOtic guide for SHOP) developer team visit the Juguetronica Shop and The Robot Museum to test our robotic platform in a real scenario.



